倒車雷達
一、倒車雷達是什么聲波
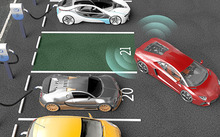
倒車雷達使用(yong)的(de)是超(chao)聲(sheng)波。它主要通過超(chao)聲(sheng)波來(lai)實現回聲(sheng)定位,用(yong)來(lai)探測汽車和障(zhang)礙物之間的(de)距離,并給(gei)駕駛員提供(gong)相(xiang)應(ying)的(de)信(xin)息(xi)。在(zai)倒車的(de)時(shi)候,會有距離提示(shi)的(de)警(jing)告聲(sheng)響起,駕駛員只(zhi)要根據(ju)警(jing)告聲(sheng)來(lai)進行合理化的(de)操作就可以實現平穩泊車。
倒車(che)雷(lei)達主要由超聲(sheng)(sheng)波(bo)傳感器(qi)、控制器(qi)、蜂鳴(ming)器(qi)三(san)部分組成。當(dang)它工作的(de)時(shi)(shi)候,超聲(sheng)(sheng)波(bo)傳感器(qi)就(jiu)會(hui)向外散發(fa)超聲(sheng)(sheng)波(bo),當(dang)超聲(sheng)(sheng)波(bo)觸(chu)碰到障礙(ai)物的(de)時(shi)(shi)候就(jiu)會(hui)反彈(dan)回(hui)來,然后被超聲(sheng)(sheng)波(bo)傳感器(qi)重新接收。接著,控制器(qi)就(jiu)會(hui)根(gen)據超聲(sheng)(sheng)波(bo)發(fa)散和回(hui)彈(dan)的(de)時(shi)(shi)間(jian)來計算車(che)子與(yu)障礙(ai)物的(de)距離,最后再通過蜂鳴(ming)器(qi)發(fa)出(chu)的(de)警告聲(sheng)(sheng)來提示駕(jia)駛員。

二、倒車雷達的探測距離是多少
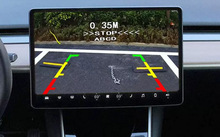
倒車雷達報(bao)警距(ju)(ju)離(li)(li)(li)是一個區間,它表明倒車雷達在(zai)車離(li)(li)(li)障(zhang)礙物(wu)最遠多(duo)大(da)距(ju)(ju)離(li)(li)(li)時(shi)開始報(bao)警。倒車雷達的(de)(de)探(tan)測(ce)距(ju)(ju)離(li)(li)(li)是0.3到1.5米,其(qi)探(tan)測(ce)距(ju)(ju)離(li)(li)(li)越(yue)(yue)短(duan)(duan),探(tan)頭就越(yue)(yue)精準。我們平時(shi)倒車的(de)(de)安全(quan)距(ju)(ju)離(li)(li)(li)一般會在(zai)1.5米,最短(duan)(duan)距(ju)(ju)離(li)(li)(li)也(ye)會有0.3米,少數超長的(de)(de)報(bao)警距(ju)(ju)離(li)(li)(li)甚至(zhi)達到2.5米,但1.5米再遠的(de)(de)距(ju)(ju)離(li)(li)(li)其(qi)實對我們的(de)(de)意義不大(da),因為能探(tan)測(ce)到越(yue)(yue)遠的(de)(de)地方,所返(fan)回的(de)(de)值誤差就越(yue)(yue)大(da)。
倒車雷達發出的警報為一定頻(pin)(pin)率(lv)(lv)的滴滴聲(sheng),同時頻(pin)(pin)率(lv)(lv)會隨(sui)著障(zhang)礙物(wu)的靠近(jin)而增快,當滴滴聲(sheng)頻(pin)(pin)率(lv)(lv)越來越快,并(bing)伴有長鳴(ming)聲(sheng)音時,說(shuo)明車(che)輛離(li)障(zhang)礙物(wu)越近(jin)。